

Mercator V7
Mercator ist ein Softwaresystem zur Visualisierung und Steuerung komplexer Fertigungsabläufe, speziell im Bereich der Lasermaterialbearbeitung unter Ver-
wendung von Industrierobotern.
Es ist jedoch auch für die roboterbasierte Fertigung beim Kleberauftrag oder für das Rollfalzen ausgezeichnet zu verwenden – kurzum für alle Roboteranwen-
dungen, bei denen es auf die präzise Einhaltung von Geschwindigkeiten und Pro-
zessparametern bei einfachster Bedienung ankommt.
MERCATOR ist ein modular aufgebautes, fensterorientiertes grafisches Soft-
waresystem zur Optimierung von Fertigungssystemen. Es ermöglicht die Vi-
sualisierung von sonst nur schwer zugänglichen Bahndaten ebenso wie deren
Verknüpfung mit den verschiedensten Prozessdaten.
Mit Hilfe der in MERCATOR integrierbaren Module wird die Fehlersuche in Pro-
duktionsabläufen erleichtert und verkürzt. Auch die Darstellung von Roboter-
programmen von Kuka, SEF und Fanuc ist mit dem Modul FolgenEditor möglich. Durch den Anschluss von verschiedenartigen Sensoren an die Sikora Umschalt-
box können vielfältige Sensorikanwendungen mit dem System realisiert werden.
Außerdem erleichtert das Programm die tägliche Arbeit mit dem Roboter, indem
es Arbeiten wie die Bestimmung des TCP oder das Dateimanagement der
Robotersteuerung unterstützt.
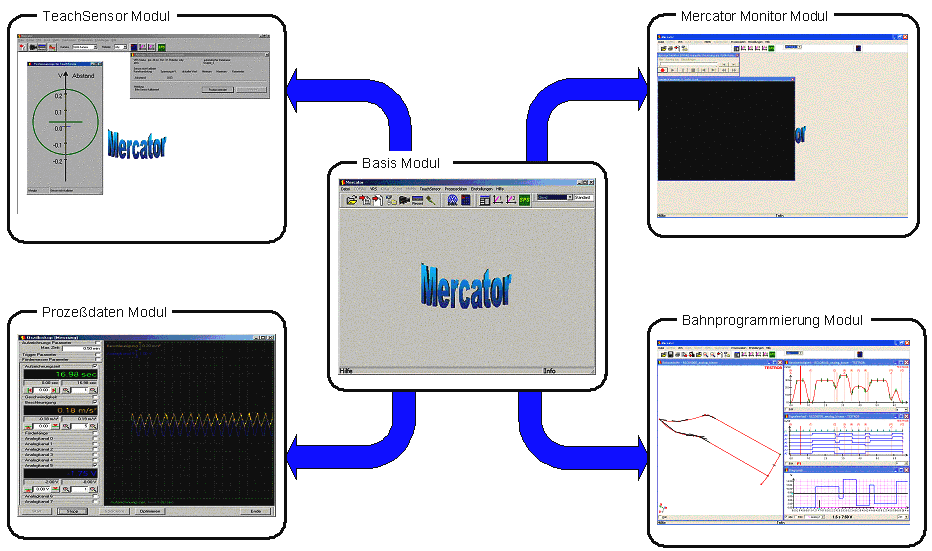
Das Basismodul bildet die Grundlage für jedes MERCATOR Softwaresystem.
Die übrigen Module wie Mercator Monitor (MeMo), TeachSensor (TS),
Prozessdatenerfassung, der FolgenEditor sowie die Verbindungsmodule zu VRS,
VKRC, KRC und Fanuc liefern anwendungsspezifische zusätzliche Funktionen,
die entsprechend der von Ihnen erworbenen Konfiguration genutzt werden
können. Weitere Module sind in Entwicklung.
Mit der neuen Version von Mercator (V7.x) können darüber hinaus Remote-
Schweißungen mit der PFO und normale Schweißsteps bequem am PC
eingerichtet und optimiert werden.
Je nach Erwerb von Modulen, Benutzerlevel und Zubehörteilen (z.B. Sikora-
Umschaltbox) stehen mehr Menüpunkte,Auswahlboxen und Funktionen in der Oberfläche zur Verfügung.
Um die Daten der Robotersteuerungen einfach zu verwalten, ist in Mercator eine
dem normalen Windows-Explorer ähnliche Dateiverwaltung integriert, die über
den Menüpunkt „Datei Manager“ erreicht werden kann.
Mercator-Module:
Mercator Softwarebasispaket
Prod.-Nr.: [010-607-01]
Funktion:
Mit dem Basispaket werden die Grundfunktionen zur Analyse von Roboterbahnen zur Verfügung gestellt. In diesem Modul sind die Funktionen zur Anlagen-
konfiguration, Einrichtung und Kommunikation sowie ein Dateimanager enthalten.
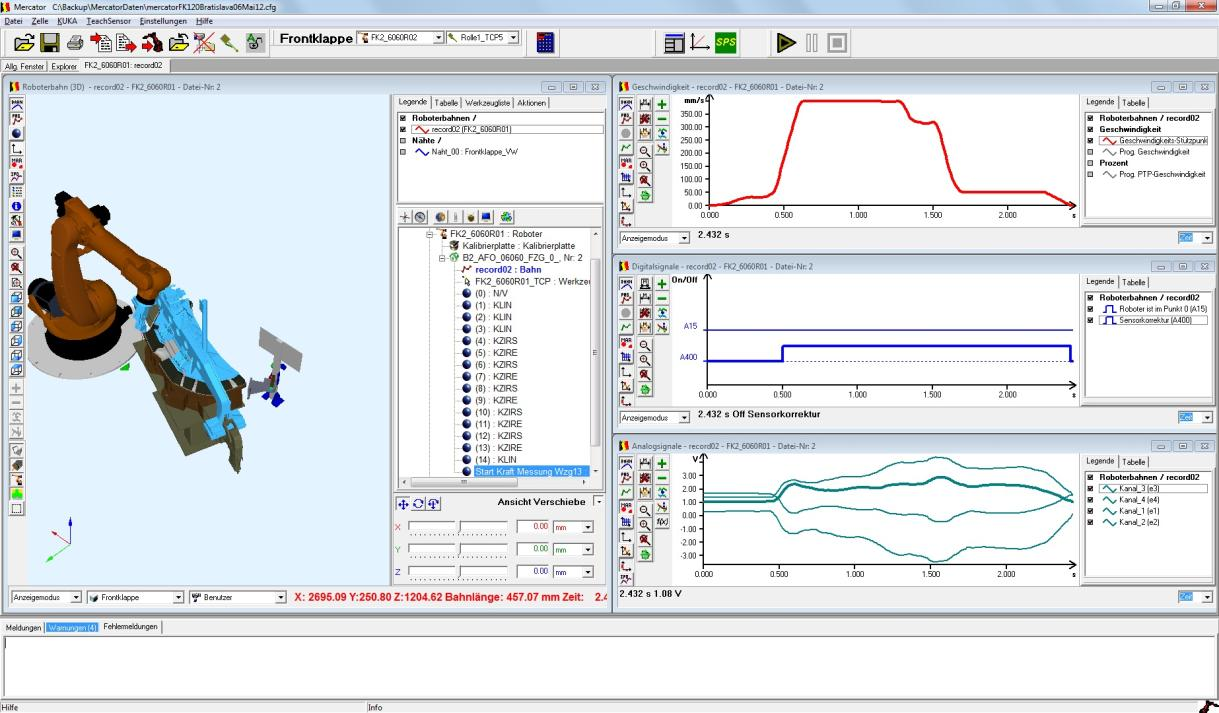
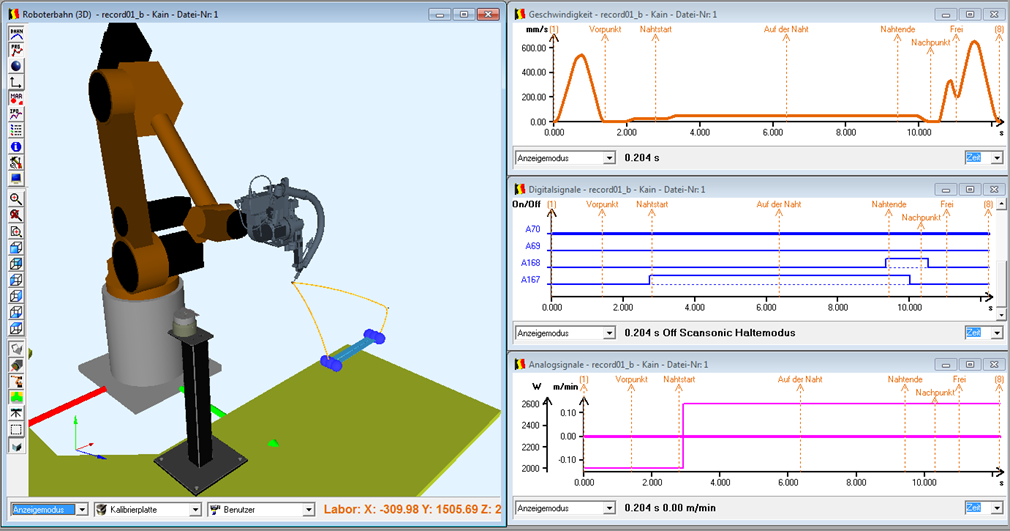
Zusätzlich enthält das Paket die Funktionalität des Moduls Mercator Viewer. Über eine Ethernet-Schnittstelle zur jeweiligen Robotersteuerung (KUKA, Fanuc, VRS) können sowohl Roboterprogramme als auch speziell von der Steuerung aufge-
zeichnete IBGN-Dateien in der Vier-Fenster-Technik dargestellt werden. Mit dieser Darstellungstechnik können die Position/Orientierung, die Geschwin-
digkeit, die Binärsignale und die analogen Prozesssignale jeweils in einem eigenen Fenster grafisch übersichtlich dargestellt und -Dank in allen Fenstern mitgeführten Cursors- korreliert werden.
Voraussetzung für IBGN-Dateien ist eine IBGN-Funktionalität seitens der Robotersteuerung. Damit werden von der Robotersteuerung Bahn- und Signal-
daten in eine Datei im ASCII-Format geschrieben und zwar für jeden IPO-Takt einen Datensatz. Der IPO-Takt ist das kleinste zeitliche Rechenintervall der Robotersteuerung und liegt je nach Steuerung bei 9 bis 12 ms. Das ASCII-Format macht die IBGN-Datei für gewöhnliche Editoren les- und editierbar.
In einem Positionsfenster wird die Roboterbahn als farbige Röhre dargestellt, je nach hinterlegten CAD-Daten auch mit Bauteilen und Vorrichtungen. Durch die Hinterlegung einer Roboterkinematik kann der Roboter animiert werden und zusätzlich der Achswinkelverlauf, sowie die Achswinkelgeschwindigkeit und
-beschleunigung angezeigt werden.
Durch einen fensterübergreifenden Cursor und zusätzliche Markerfunktionen können Roboterbahnen sehr einfach und genau analysiert werden. Es können auch mehrere Bahnen übereinander gelegt und verglichen werden, so dass Programmänderungen und deren Auswirkungen einfach erkannt werden können.
Die Anordnung der Fenster, sowie die Fenstereigenschaften können in einem Layout-Manager vordefiniert werden. Die Darstellungen können vielfältig auf verschiedene Papierformate gedruckt werden.
Der Mercator-Explorer ist ein Dateiverwaltungsprogramm mit Filter- und Sortierfunktionen. Zusätzlich wird die aktuelle Konfiguration in einer Baumstruktur dargestellt. 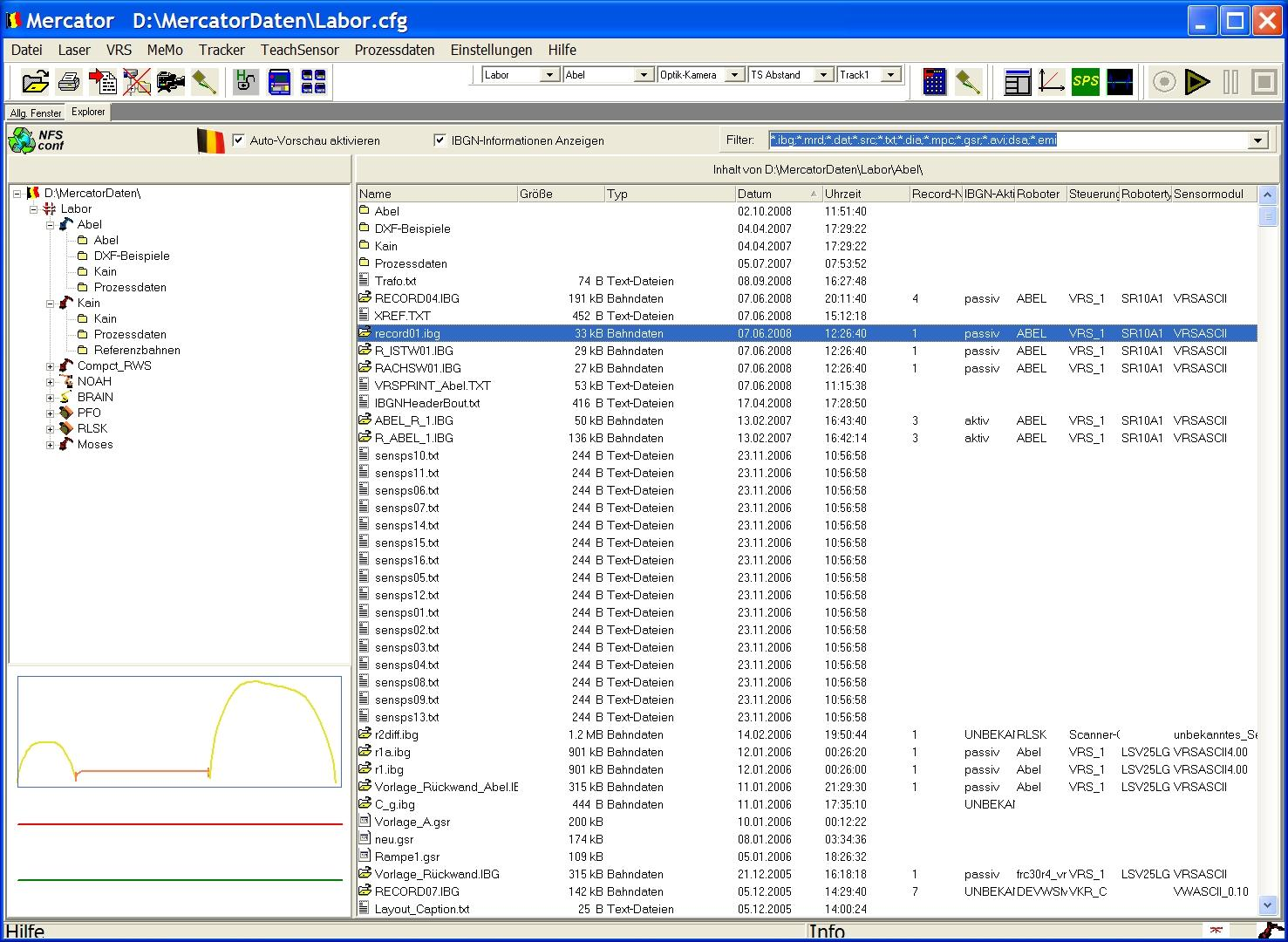
Technische Voraussetzungen:
- Betriebssystem: Windows 7, 8 (Windows 10 oder ältere Versionen (2000, XP, Vista) auf Anfrage)
- Prozessor: mindestens 1GHz
- Grafikkarte: Grafikkarte ab 256 MB RAM, DirectX ® 9 Unterstützung
- Arbeitsspeicher: mindestens 512MB, empfohlen 1GB
- Schnittstelle: Ethernet
Zubehör:
- Track-In System
- Weitere Softwaremodule von Mercator:
- Viewer
- MercatorMonitor MeMo
- Prozessdaten
- FolgenEditor
- Bahnprogrammierung
- TeachSensor
Wir bieten Ihnen auch gern einen optimal abgestimmten Desktop PC oder Laptop mit an.
Mercator-Viewer
Prod.-Nr.: [010-604-00]
Funktion:
Der Mercator Viewer dient zur exakten Visualisierung von Roboterbahnen. Eine Roboterbahn beinhaltet die folgenden vier Datentypen:
- Position: gefahrene Bahn in XYZABC-Daten mit Soll- und Istwerten
- Geschwindigkeit: Verlauf der programmierten und der tatsächlichen Geschwindigkeit
- Digitale Signale: genaue Darstellung der geschalteten Signale über Weg oder Zeit
- Analoge Signale: genaue Darstellung der Prozess-Signale über Weg oder Zeit
Für jede dieser Daten stellt Mercator ein separates Fenster dar. Alle Fenster sind so verknüpft, das die Bewegung der Maus in einem Fenster in allen anderen Fenstern mit einem Cursor abgebildet wird. Somit hat man einen optimalen Überblick. In jedem einzelnen Fenster stehen entsprechende Zoom- und Marker-Funktionen zur Verfügung. Voraussetzung für die Visualisierung ist eine sogenannte ASCII-Schnittstelle der jeweiligen Steuerung.
Technische Voraussetzungen:
Betriebssystem: Windows 7, 8 (Windows 10 oder ältere Versionen (2000, XP, Vista) auf Anfrage)
Prozessor: mindestens 1GHz
Grafikkarte: Grafikkarte ab 256 MB RAM, DirectX ® 9 Unterstützung
Arbeitsspeicher: mindestens 512MB, empfohlen 1GB
Schnittstelle: Ethernet
Zubehör:
- Track-In System
- Weitere Softwaremodule von Mercator:
- MercatorMonitor MeMo
- Prozessdaten
- FolgenEditor
- Bahnprogrammierung
- TeachSensor
Wir bieten Ihnen auch gern einen optimal abgestimmten Desktop PC oder Laptop mit an.
Mercator Bahnprogrammierung
Prod.-Nr.: [010-608-10]

Funktion:
Voraussetzung für den Einsatz des Bahnprogrammierungsmoduls ist das Aufzeichnen von Bahn- und Signaldaten in sogenannten IBGN-Dateien. Dabei werden von der Robotersteuerung Bahn- und Signaldaten in eine Datei im ASCII-Format geschrieben und zwar für jeden IPO-Takt einen Datensatz. Der IPO-Takt ist das kleinste zeitliche Rechenintervall der Robotersteuerung und liegt je nach Steuerung bei 9 bis 12 ms.
Das ASCII-Format macht die IBGN-Datei für gewöhnliche Editoren les- und editierbar.
Mit dem Modul Bahnprogrammierung können aufgezeichnete ASCII-Dateien in der Geschwindigkeit, im Signalverlauf, sowie in den analogen Prozessdaten graphisch IPO-Takt-genau editiert werden. Diese komfortable Programmierung erlaubt z.B. das Anpassen von Geschwindigkeitsverläufen. Funktionen zur schnellen Beschleunigung auf kurzen Abschnitten helfen Taktzeit zu sparen.
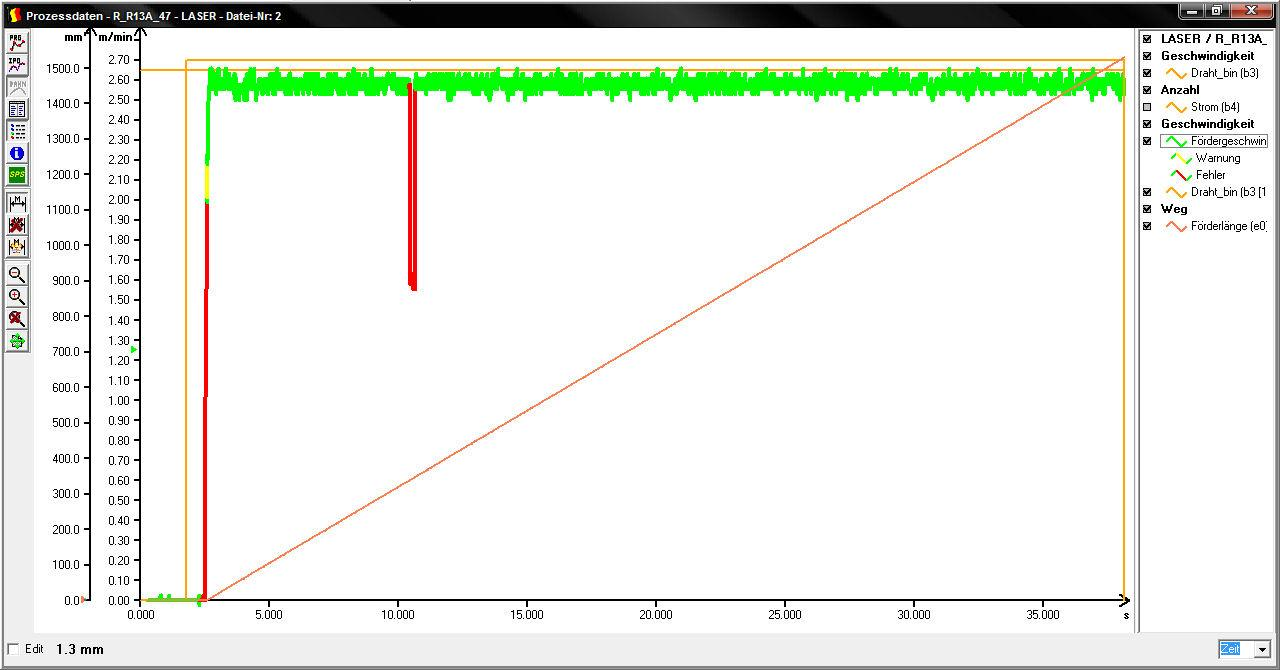
Ein Beispiel für Geschwindigkeitsoptimierung ist in der folgenden Abbildung dargestellt:
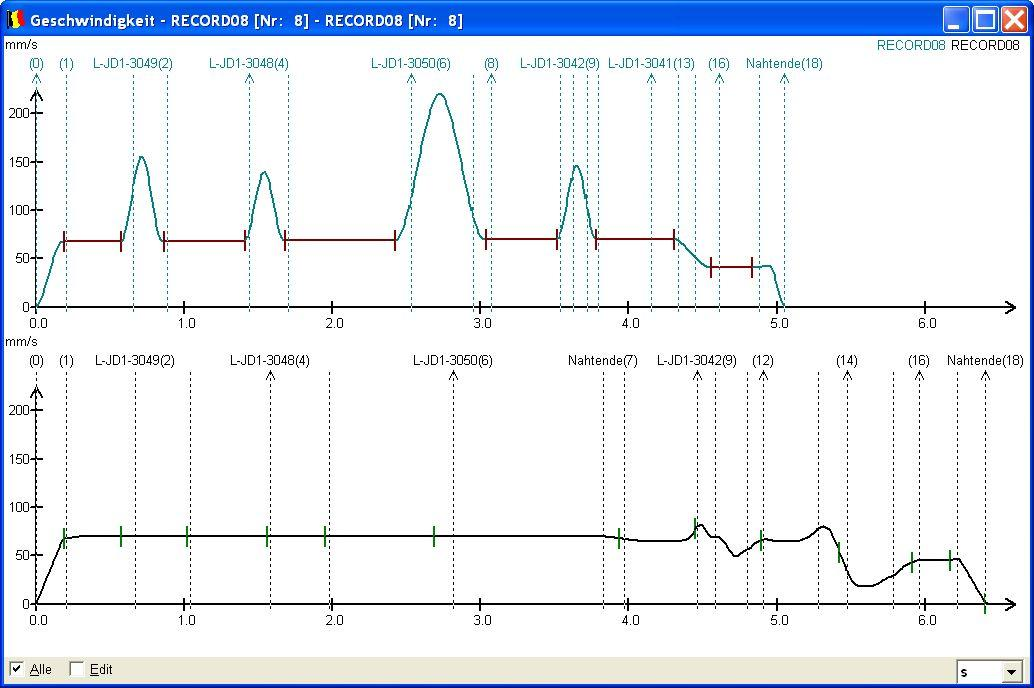
Im unteren Geschwindigkeitsverlauf ist die originale Bahngeschwindigkeit einer Laserschweißapplikation abgebildet. Der obere Verlauf zeigt die Geschwindigkeit nach einer Optimierung mit Mercator. Zum einen sind die gewünschten Prozessgeschwindigkeiten eingehalten, zum anderen ist zwischen den Bearbeitungsabschnitten die Geschwindigkeit automatisch optimiert worden.
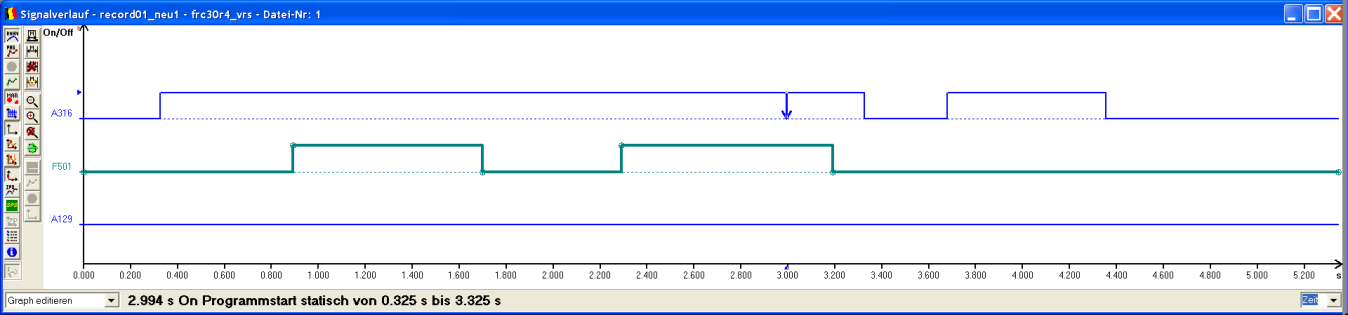
Auch SPS-Signale können einfach graphisch nachbearbeitet werden, so dass z.B. exakte Schweißnahtlängen erzeugt werden können. Vorteil dieses Verfahrens ist es auch, dass die Anpassungen auf dem Mercator-PC während der Produktion erfolgen können und somit Stillstands-Zeiten reduziert werden.
Das generierte Bearbeitungsprogramm kann vorab als Videoanimation dargestellt werden. So kann sofort eine Einschätzung der Taktzeit vorgenommen werden und ein Eindruck von der Bewegung des Roboters und der Eignung des Roboterprogramms gewonnen werden. Prozessparameter wie z.B. die Bearbeitungsgeschwindigkeit können grafisch dargestellt und editiert werden. Die Darstellung und das Editieren der Daten in einer Tabelle ist ebenfalls möglich.
Technische Voraussetzungen:
Betriebssystem: Windows 7, 8 (Windows 10 oder ältere Versionen (2000, XP, Vista) auf Anfrage)
Prozessor: mindestens 1GHz
Grafikkarte: Grafikkarte ab 256 MB RAM, DirectX ® 9 Unterstützung
Arbeitsspeicher: mindestens 512MB, empfohlen 1GB
Schnittstelle: Ethernet
Zubehör:
- Track-In System
- Weitere Softwaremodule von Mercator:
- Viewer
- MercatorMonitor MeMo
- Prozessdaten
- FolgenEditor
- TeachSensor
Wir bieten Ihnen auch gern einen optimal abgestimmten Desktop PC oder Laptop mit an.
Mercator Folgeneditor
Prod.-Nr.: [010-605-10]
Funktion:
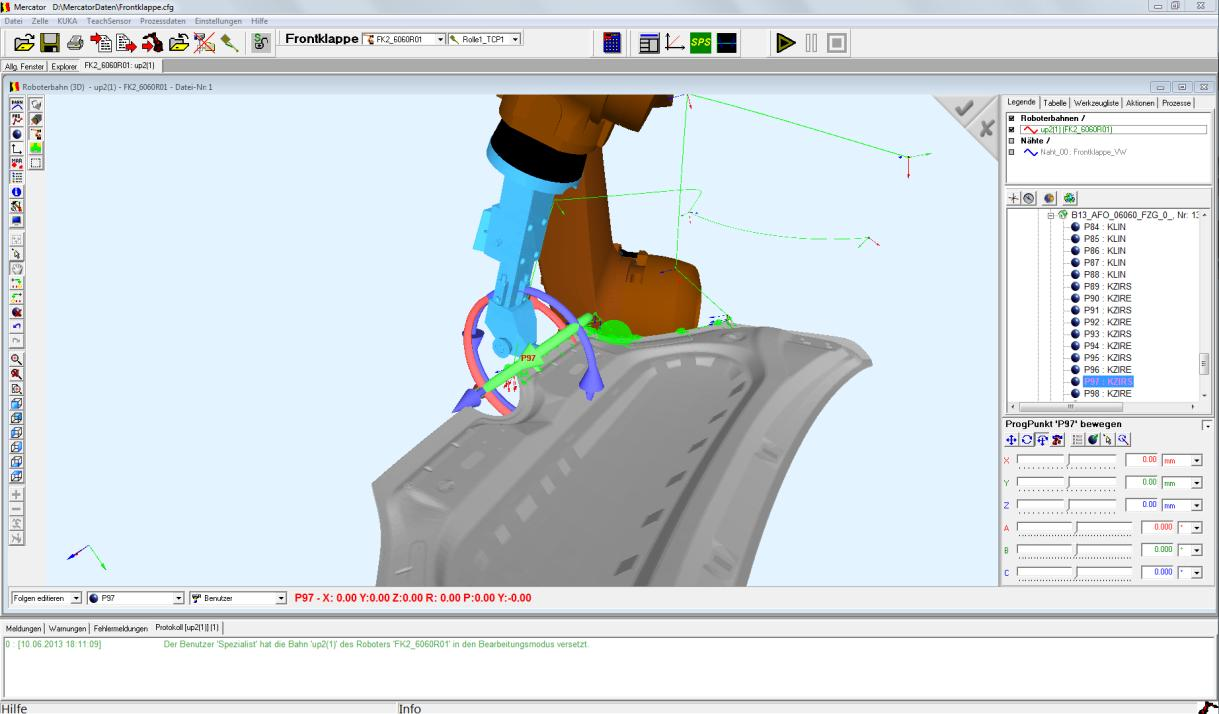
Der Folgeneditor ist das Softwaremodul von MERCATOR zum Ändern von Roboterprogrammen. Anschließend können die veränderten Folgen wieder als Roboterfolge abgespeichert bzw. zum Roboter übertragen werden. Dabei geht der Mercator Folgeneditor weit über die Möglichkeiten herkömmlicher Editoren hinaus und lässt eine komfortable Bearbeitung auf grafischer oder numerischer Ebene zu. Dazu zählen:
- Positionierung der Punkte
- Freies Positionieren in der Bauteiloberfläche
- Genaue Visualisierung mit Bauteil, Roboter, Werkzeug
- Verschieben und Verdrehen der positionierten Punkte
- Markieren und Bearbeiten von mehreren Punkten gleichzeitig
- Bearbeitung der Punkte auf Basis verschiedenster Koordinatensysteme
- Löschen von Punkten
- Änderung der Reihenfolge
- Einfache Programmierung von SPS-Schaltbefehlen im Punkt sowie Optimierungsmöglichkeiten
- Optimierung der Punktreihenfolge
- Geometrieoptimierung der Roboterbahn unter Berücksichtigung des Arbeitsraumes und der Bauteilumgebung
- Orientierungsoptimierung der Roboterbahn
- Geschwindigkeitsoptimierung der Roboterbahn
Zur Programmierung der Roboterfolgen sind keine steuerungsspezifischen Fachkenntnisse erforderlich. Aus den in Mercator programmierten Bahnpunkten generiert Mercator eine Roboterfolge in der Sprache der verwendeten Steuerung.
Das generierte Bearbeitungsprogramm kann vorab als Videoanimation dargestellt werden. So kann sofort eine Einschätzung der Taktzeit vorgenommen werden und ein Eindruck von der Bewegung des Roboters und der Eignung des Roboterprogramms gewonnen werden.
Prozessparameter wie z.B. die Bearbeitungsgeschwindigkeit können grafisch dargestellt und editiert werden. Die Darstellung und das Editieren der Daten in einer Tabelle ist ebenfalls möglich.
Technische Voraussetzungen:
Betriebssystem: Windows 7, 8 (Windows 10 oder ältere Versionen (2000, XP, Vista) auf Anfrage)
Prozessor: mindestens 1GHz
Grafikkarte: Grafikkarte ab 256 MB RAM, DirectX ® 9 Unterstützung
Arbeitsspeicher: mindestens 512MB, empfohlen 1GB
Schnittstelle: Ethernet
Zubehör:
- Track-In System
- Weitere Softwaremodule von Mercator:
- Viewer
- MercatorMonitor MeMo
- Prozessdaten
- Bahnprogrammierung
- TeachSensor
Wir bieten Ihnen auch gern einen optimal abgestimmten Desktop PC oder Laptop mit an.
MercatorMonitor MeMo
Prod.-Nr.: [ 010-602-10]
Funktion:
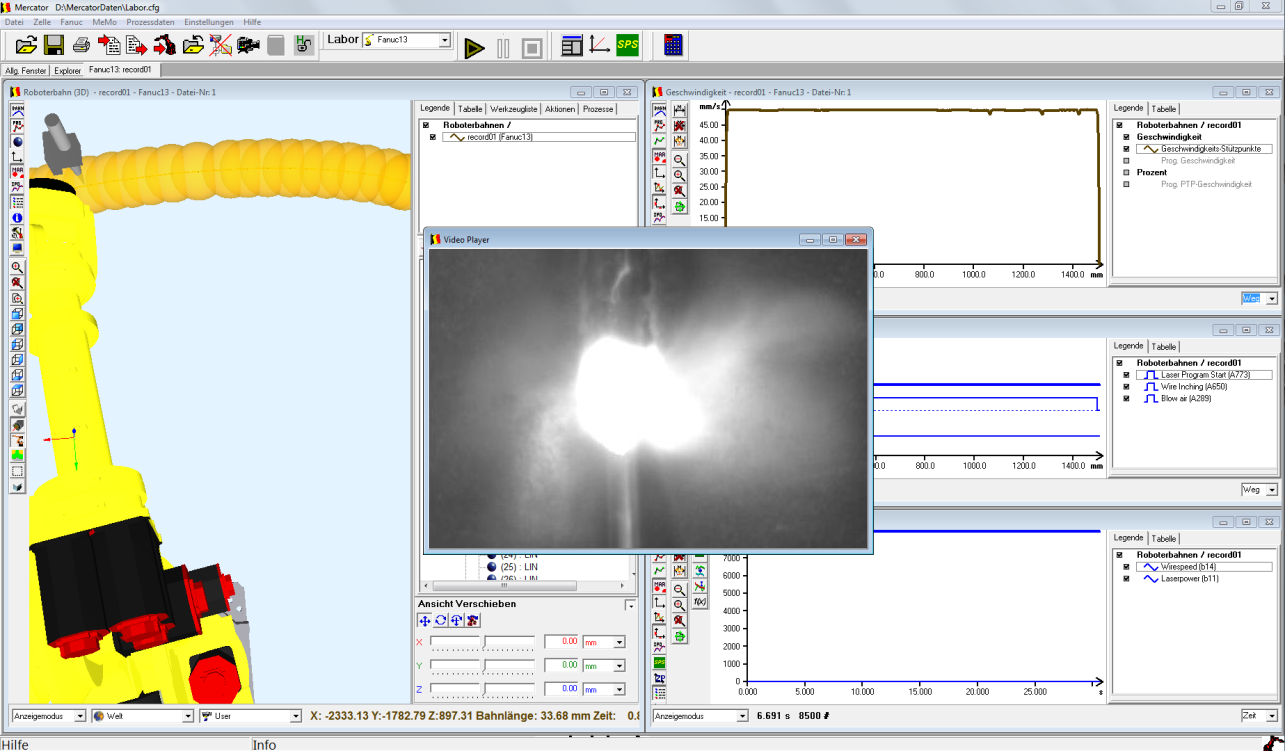
Der MercatorMonitor erlaubt das Aufzeichnen von Kamerabildern und das weg- und zeitsynchrone abspielen von Videodaten mit der Bewegung des Roboters. Voraussetzung dafür ist eine Robotersteuerung mit IBGN-Funktionalität für das Aufzeichnen von Roboterbahn- und Signaldaten in sogenannten IBGN-Dateien.
Dabei werden von der Robotersteuerung Bahn- und Signaldaten in eine Datei im ASCII-Format geschrieben und zwar für jeden IPO-Takt einen Datensatz. Der IPO-Takt ist das kleinste zeitliche Rechenintervall der Robotersteuerung und liegt je nach Steuerung bei 9 bis 12 ms. Das ASCII-Format macht die IBGN-Datei für gewöhnliche Editoren les- und editierbar.
- Die Features des MercatorMonitors sind:
-
- Livebildanzeige
- Kameraumschaltung
- Schnapp-Schuss als *.bmp
- Vollbildanzeige
- Markerfunktionen, um bestimmte Zonen zu kennzeichnen
- Videorecorder
- Automatischer Videotrigger zum Starten und Stoppen
- Zeitlupe / Standbild
- Wiedergabe mit Roboterbahn verknüpft, wegabhängige Darstellung möglich
- Livebildanzeige
-
Technische Voraussetzungen:
Betriebssystem: Windows 7, 8 (Windows 10 oder ältere Versionen (2000, XP, Vista) auf Anfrage)
Prozessor: mindestens 1GHz
Grafikkarte: Grafikkarte ab 256 MB RAM, DirectX ® 9 Unterstützung
Arbeitsspeicher: mindestens 512MB, empfohlen 1GB
Schnittstelle: Ethernet
Zubehör:
- Track-In System
- Weitere Softwaremodule von Mercator:
- Viewer
- Prozessdaten
- FolgenEditor
- Bahnprogrammierung
- TeachSensor
Wir bieten Ihnen auch gern einen optimal abgestimmten Desktop PC oder Laptop mit an.
Mercator Prozessdaten
Prod.-Nr.: [010-600-10]
Funktion:
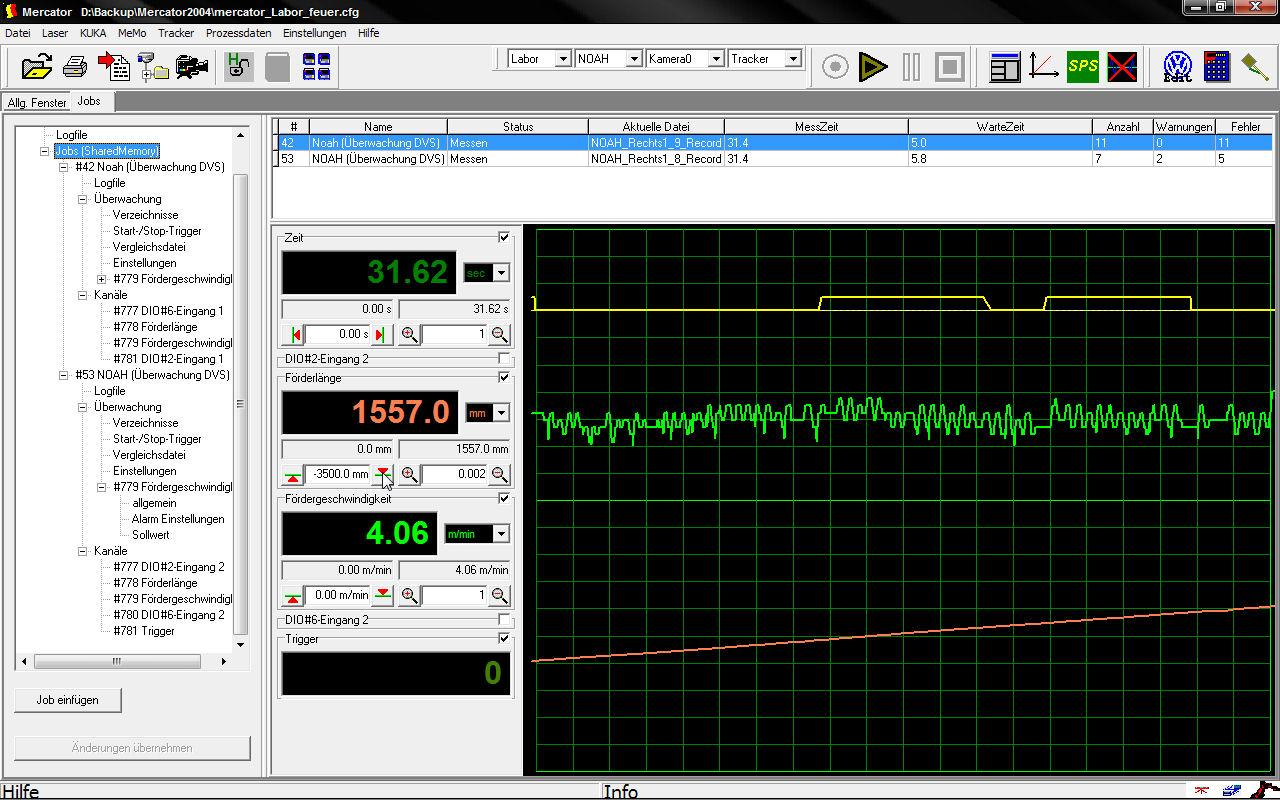
Mit dem Modul Prozessdaten können digitale und analoge Signale aufgezeichnet, angezeigt, weiterverarbeitet und ausgewertet werden. Das Triggern von Messungen ist sowohl durch binäre Signale, durch analoge Signalgrenzen als auch durch den Roboter möglich. Die Signalauswertung kann in so genannten Jobs definiert werden und findet dann im Hintergrund von Mercator durch einen speziell entwickelten Datenserver statt. Jede Messung kann über einen automatischen Dateinamen in einer Art Ringpuffer gespeichert werden.
Die Daten können anschließend gemeinsam mit der Roboterbahn geöffnet werden, so dass eine direkte Zuordnung nicht nur über die Zeit, sondern auch über die Bahnlänge möglich ist. Je nach angeschlossener Hardware lassen sich unterschiedliche Messfrequenzen realisieren. Standardmäßig wird eine USB-Umschaltbox der Sikora GmbH eingesetzt, mit der man flexibel analoge und binäre Prozesssignale und speziell auch die Fördergeschwindigkeit von Löt- und Zusatzdraht bei Laserfügeprozessen mit einer Frequenz von bis zu 1 KHz abtasten kann. Bei höheren Abtastraten können andere USB-Tastköpfe eingesetzt werden, mit denen bis zu 5 MHz möglich ist.
Mit diesem Softwaretool ist ein automatische Auswertung zwischen den gemessenen Signalen und den vom Roboter vorgegebenen Sollwerten als Ampelschaltung (grün = IO; gelb = grenzwertig; rot = NIO) möglich.
Über Ausgänge können diese Zustände an die Anlagensteuerung gemeldet werden.
Auswertungsbeispiel der Drahtvorschubgeschwindigkeit:
Technische Voraussetzungen:
Betriebssystem: Windows 7, 8 (Windows 10 oder ältere Versionen (2000, XP, Vista) auf Anfrage)
Prozessor: mindestens 1GHz
Grafikkarte: Grafikkarte ab 256 MB RAM, DirectX ® 9 Unterstützung
Arbeitsspeicher: mindestens 512MB, empfohlen 1GB
Schnittstelle: Ethernet
Zubehör:
- Track-In System
- Weitere Softwaremodule von Mercator:
- Viewer
- MercatorMonitor MeMo
- FolgenEditor
- Bahnprogrammierung
- TeachSensor
Wir bieten Ihnen auch gern einen optimal abgestimmten Desktop PC oder Laptop mit an.