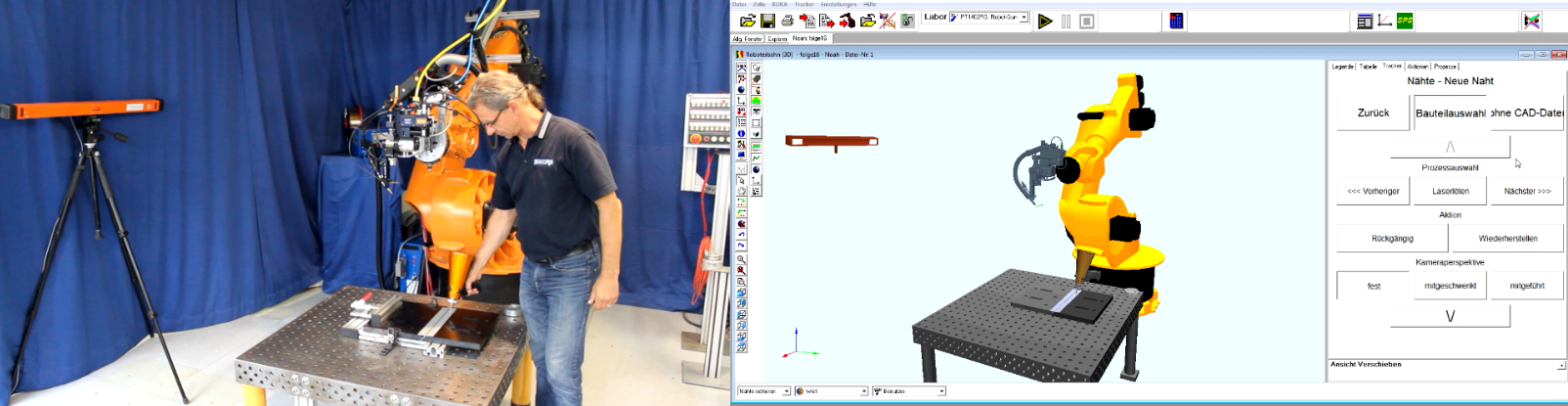
Das durch die Sikora GmbH entwickelte Track-In System soll dem Anwender bei der Programmierung einer Roboterbahn für Kuka und Fanuc (ABB in Vorbereitung) behilflich sein.
Das System besteht aus der Mercator Software, einem Messbalken und einem Programmiertool. Diese drei Komponenten sind ausreichend, um dem Roboter zu zeigen, wo sich das Bauteil befindet, wie der Roboter zum Bauteil gelangt und wie er es bearbeiten soll.
Mercator:
Messbalken und Programmiertool:
Das System vereinfacht nicht nur den Teachprozess, es reduziert auch die Programmierzeit gegenüber dem „normalen Teach in“ um bis zu 70%.
Ein weiterer Vorteil des Track-In Systems ist, dass jeder mit diesem System in der Lage ist, Roboterbahnen einschließlich des Prozesses zu programmieren. Sowohl bahn-bezogene Prozesse wie z. B. Schweißen, Kleben, Laserlöten als auch punkt-bezogene Prozesse sind möglich. Es sind kaum Vorkenntnisse von Nöten.
So kann nun jeder einen Roboter programmieren und jegliche Prozesse schnell und einfach in die Produktion einbinden.
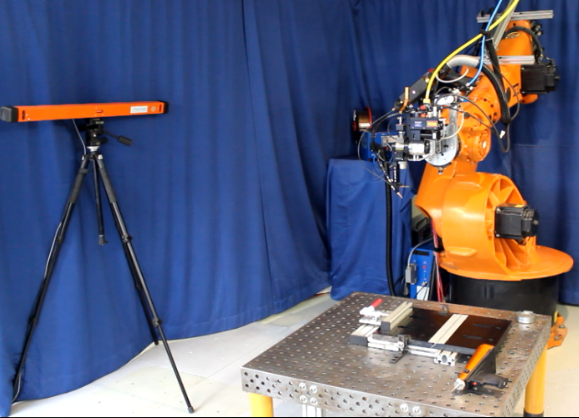
Die Position des Messbalkens zum Roboter muss eingemessen werden. Dies ist einfach in 10min möglich. Der Roboter fährt eine einfache PTP-Bahn mit 8-10 Raumpunkten ab, so das die Mercator-Software über sogenannte Marker die exakte Position des Messbalkens berechnen kann.
Wenn zum Bauteil CAD-Daten vorhanden sind, müssen diese Daten zum realen Bauteil in der Mercator-Software eingemessen werden. Drei Referenzmarker auf dem CAD-Bauteil werden mit den gleichen Punkten des Realbauteils abgeglichen.
Phase 1:
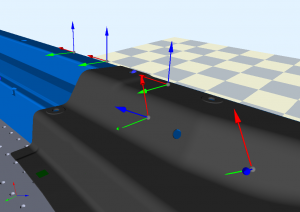
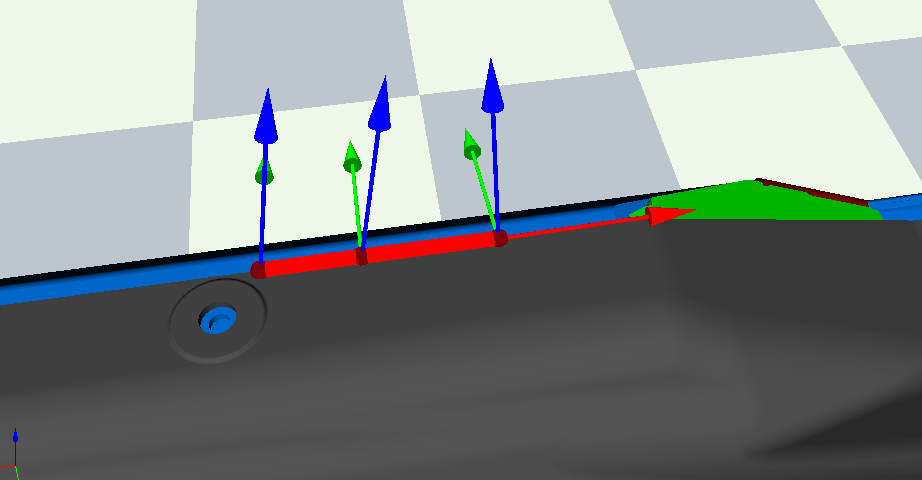
Die Nahtprogrammierung dient zur Beschreibung der eigentlichen Bearbeitung auf dem Bauteil. Der Anwender zeigt mit dem Programmiertool auf die Bauteilabschnitte, die mit dem Roboter bearbeitet werden sollen. Durch setzen von einzelnen Punkten oder durch entlang führen an einer Kante wird die Geometrie beschrieben. Die entsprechenden Prozessparameter (Geschw., Offset, Winkel, Signale) sind in der Mercator-Software hinterlegt.
Phase 2:
In der Folgenprogrammierung wird der Roboter über einzelne Stützpunkte zu den programmierten Nähten hingeführt. Die einzelnen Nähte werden in die Folge integriert.
Phase 3:
Überprüfung des Ablaufs und Übertragung des fertigen Programms in die jeweilige Steuerung.
Die Track-In Programmierung ist vielfältig einsetzbar. Sowohl punktbezogene als auch bahn-
bezogene Prozesse können sehr einfach programmiert werden. Die Track-In Programmierung beschränkt sich nicht nur auf die einfache Geometriebeschreibung der Roboterbahn, sondern kann den vollständigen Bearbeitungsprozess beschreiben. Dies wird ermöglicht durch das Zwei-Stufen-Konzept in unserer Software Mercator.
1. Stufe: Prozessbeschreibung durch die Nahtprogrammierung.
Zur Nahtprogrammierung können Sie mit dem Programmiertool direkt auf dem Bauteil die jeweilige Naht zeigen. Bei punktbezogenen Prozessen wie z.B Schrauben, Bolzenkleben, Punktschweißen, können Sie einfach jeden Punkt auf der Bauteiloberfläche zeigen.
Haben Sie zu Ihrem Bau-
teil keine CAD-Daten wird die Orientierung des Pro-
grammiertools direkt übernommen. Haben Sie CAD-Daten (Format: *.igs; *.stp; *.stl; *.jt) hinterlegt, können die Bauteilsenk-
rechten direkt aus diesen Daten übernommen werden. Bei bahnbezogenen Prozessen wie z.B. Laserlöten/ Laserschweißen, Rollfalzen, Kleben, können Sie ebenfalls durch mehrere Nahtpunkte hintereinander den Verlauf einer Naht beschreiben. Sie können auch einfach das Programmiertool entlang einer Kontur ziehen und die Software generiert automatisch die erforderlichen Nahtstützpunkte.
Wenn Sie eine hochpräzise Nahtbeschreibung benötigen, können auch alle gemessenen Stützpunkte in einem festen Zeitraster hinterlegt werden. Bei dieser Möglichkeit kann auch die Führungsgeschwindigkeit des Bedieners als Prozessgeschwindigkeit mit aufgezeichnet werden. In der Software können die benötigten Prozessparameter eingerichtet werden. Zusätzlich können noch je ein Nahtvorpunkt und ein Nahtnachpunkt beschrieben werden, so dass auch das Ein- / Ausfahren aus dem Prozess vordefiniert werden kann. Jede Naht ist ein Prozess zugeordnet, in dem die Prozessgeschwindigkeit sowie die erforderliche Parameter definiert sind.
2. Stufe: Erstellung des Roboterprogramms, durch Integration der Nähte.
Bevor Sie mit der Programmierung beginnen können, sollte die Bauteilposition zum Roboter so gewählt werden, dass alle Nahtpunkte erreichbar sind. Legen Sie das Bauteil in die Bearbeitungsstation und messen Sie die Position über drei Referenzpunkte ein. Nun müssen Sie nur noch die einzelnen Nähte in der gewünschten Reihenfolge in das Roboterprogramm integrieren. Sollte auf dem Weg zu einer Naht eine Kollision erkennbar sein, können Sie einfach mit dem Programmiertool ein/mehrere Zwischenpunkte einfügen. Bevor Sie das Programm zur Robotersteuerung übertragen, können Sie den Gesamtablauf noch einmal virtuell in Mercator überprüfen in dem Sie den Playbutton klicken.
Für die Track-In Programmierung sind keine steuerungsspezifischen Kenntnisse erforderlich. Nur zur Programmübertragung und das eigentliche Abfahren von Bahnen benötigen Sie Grundkenntnisse der jeweiligen Steuerung.



 Die Track-In Programmierung ist vielfältig einsetzbar. Sowohl punktbezogene als auch bahn-
Die Track-In Programmierung ist vielfältig einsetzbar. Sowohl punktbezogene als auch bahn-