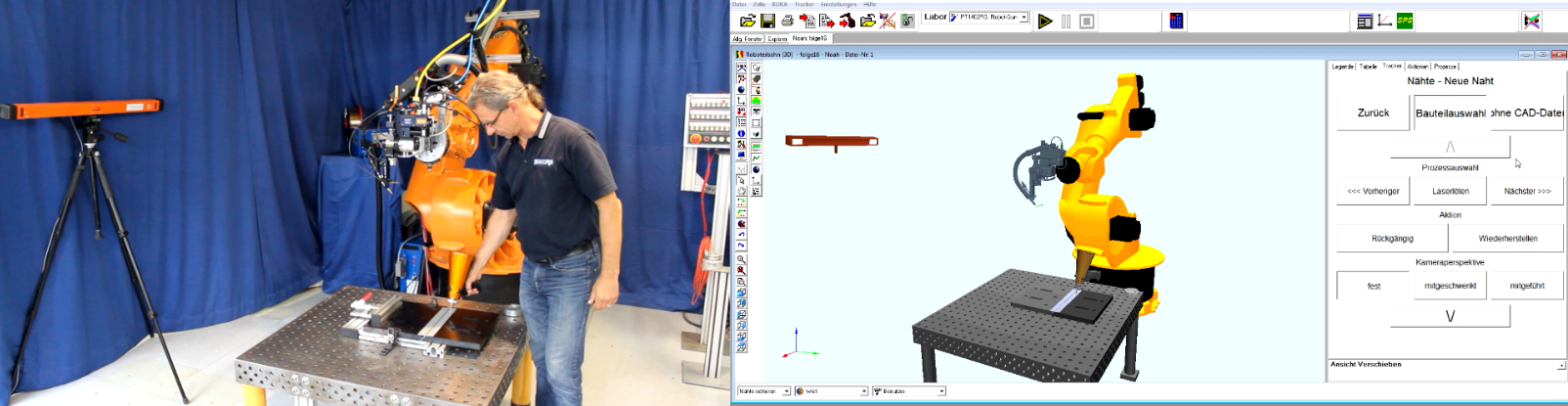
The Track-In System by Sikora GmbH is a programming tool for robot programs of KUKA and Fanuc robot controls. ABB control support is in development.
The system consists of the Mercator Software, a camera measuring bar called Tracker and a handheld programming tool called probe. These three components are sufficient to point out to the robot where the part is, how to get there and how to process it.
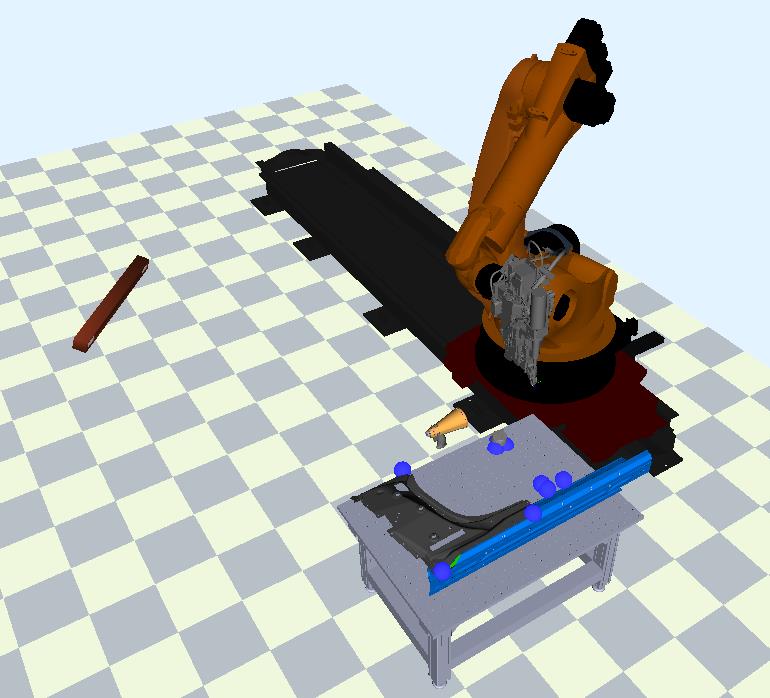
Mercator:
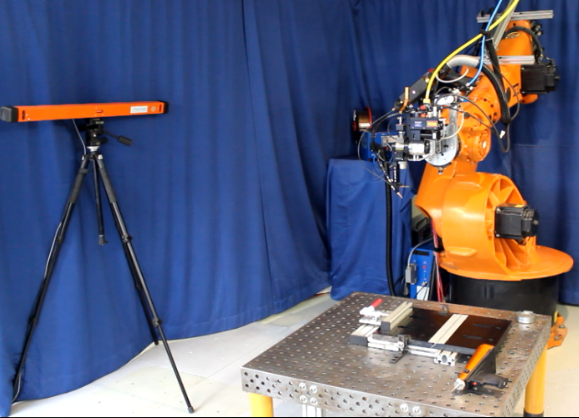
Camera Bar and handheld Programming Tool:
The Track-In System does not only simplify the robot programming, it also reduces programming times by about 70% compared to regular “Teach in” programming.
Thus the Track-In System enables anyone to generate robot movements including any kind of process with only a minimum of previous knowledge. With proper set-up even complex path- or point related processes like welding, laser brazing and adhesive bonding are easily integrated into production.
The position of the camera measuring bar in reference to the robot must be measured. This is possible in less than 10 minutes. Two methods are available:
– Reference Points:
At least three or more reference points that were made known to the system before.
– A Reference Robot Program:
The robot moves along a simple PTP-Path consisting of 8-10 points, and the Mercator-Software calculates the exact position of the Tracker by using so-called reference markers.
If CAD-Data for a specific part exists, this part needs to be positioned in the Mercator-Software. Three Reference Marker on the CAD-Part are to be alined with respective points on the real part.
Phase 1:
The seam programming is basically a description of the process on the part. The user points the programming tool to the parts areas that are to be processed by the robot. The geometry is described by setting individual points or by drag and drop. All relevant process parameters (speed, Offset, angle, signals) are set in the Mercator-Software.
Phase 2:
The robot program moves the robot to the previously defined seams via individual points. Then the seams were integrated in to the robot program.
Phase 3:
Check the program by clicking on the play button in Mercator. Transfer the robot program to the respective controller.
Track-In- Programming is usable in many ways. It is not limited to simple geometry description of the robot path, but also capable of describing the complete machining process. Both point and path related processes are programmed easily due to the two-step-concept of the Mercator Software.
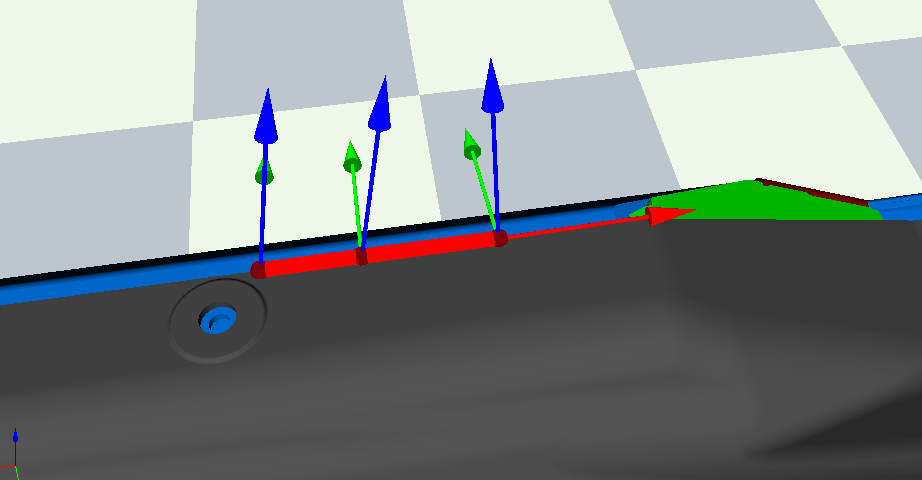
1. Step: Process description by seam programming.
With single point processes simply point the programming tool to the places on the part where you want to create the respective seam. One point and click where you want to screw, glue or spot weld.If you don’t have CAD-data for your part, you may choose to use the programming tool orientation. CAD-data (Format: *.igs; *.stp; *.stl; *.jt) allows perpendicular orientation to the parts surface.
Path related processes such as laser brazing/ laser welding, roller hemming, adhesive bonding will be represented by seam paths consisting of several seam points in a row. Instead of pointing individual points you may also drag the programming tool following a contour. The software will generate all necessary seam points automatically.
For an even more precise seam you may choose to use a fixed time frame for the seam point generation. Doing so you may even record the programmers speed for process reference speed. Each seam is assigned to a process defined in the Mercator software wherein the process speed and the required parameters are set. Additionally a pre point and a post point for automated process starting and ending can be defined here.
2. Step: Generating the robot program by integrating the seam.
Before starting the programming, make sure the processed parts position is such, that all seam points are within reach of the robot. Place the part in the processing station and aline it by using the three reference points. Then integrate the respective seams in to the robot program in the desired sequence. Make sure to avoid collisions when travelling from/to a seam by simply inserting additional points with the handheld programming tool. You may check the virtual run of the program by starting a replay in Mercator. If things are all right, transfer the robot program to the robot control.
For Track-In Programming no controller specific knowledge is needed. Only the program transfer and running the actual robot program requires basic knowledge of the respective controller.



 If you don’t have CAD-data for your part, you may choose to use the programming tool orientation. CAD-data (Format: *.igs; *.stp; *.stl; *.jt) allows perpendicular orientation to the parts surface.
If you don’t have CAD-data for your part, you may choose to use the programming tool orientation. CAD-data (Format: *.igs; *.stp; *.stl; *.jt) allows perpendicular orientation to the parts surface.